TurtleBot Path Planning
April 18, 2022
As part of a team project, I had the opportunity to work on a library assistant robot designed to help file folders. My main task was to focus on environment mapping and path planning, crucial components of the robot’s navigation system.
Environment Mapping
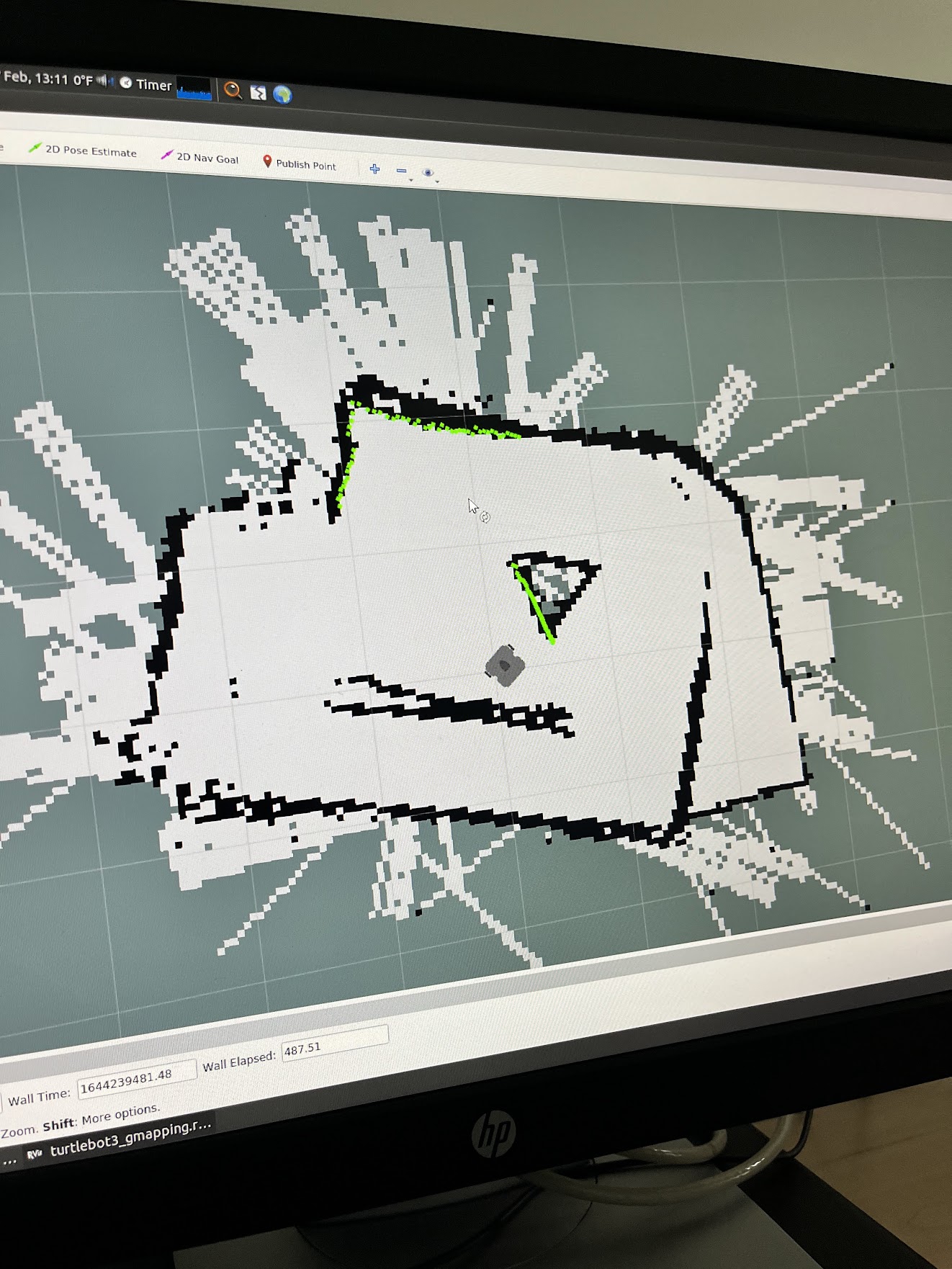
To create a physical representation of the space, we utilized a LiDAR (Light Detection and Ranging) sensor to project points and generate a map of the environment. This process allowed us to create a detailed and accurate representation of the shelves and surrounding area.
Path Planning
With the map in place, we developed a path planning algorithm to instruct the robot to move to specific coordinates within the mapped space. This involved calculating the most efficient route for the robot to take, avoiding obstacles and ensuring smooth navigation.